おおくま座とうしかい座の隣のりょうけん座の隅っこにあるM3球状星団は大きくて明るいスバラシイ球状星団で絶対に見逃せないと「星空の探訪」に案内されているけど、なかなか見つけられなかった。
今回ステラナビとEOSM5+45mmレンズの画像の助けを得て、双眼鏡で探すことができた。
おおくま座のしっぽからアルクトゥルスの春の大曲線を途中下車するようなところにあるらしいが、見つけられない原因は、大きくて明るいのは望遠鏡を使っての話で、肉眼や双眼鏡では小さくて、しかも近くに目印の星が暗く辿りづらいからでした。
まずアルクトゥルスとそのうしかい座の星座の形を知るところからお薦めします。
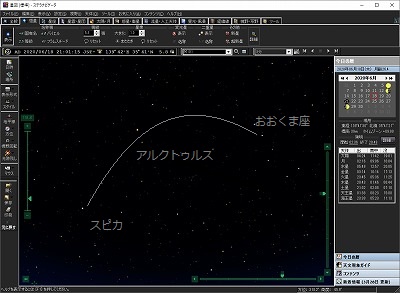
おおくま座からの春の大曲線です。
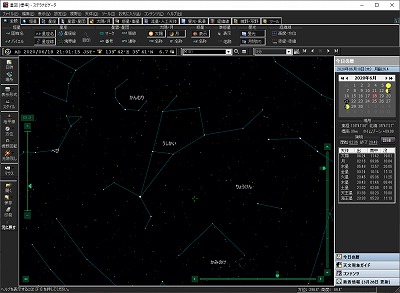
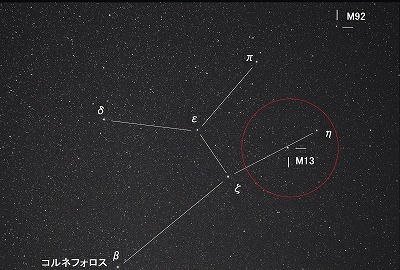
うしかい座の星の星座線と星の位置関係を覚えると分かり易いです。中央下の+マークがM3の位置です。
 まだ空が真っ暗になる前に撮った画像です。EOSM5 15-45㎜標準レンズ F=45㎜でf/6.3 ISO12800
まだ空が真っ暗になる前に撮った画像です。EOSM5 15-45㎜標準レンズ F=45㎜でf/6.3 ISO12800
 γーρ―アルクトゥルスと春の大曲線に沿ったうしかい座の星々です。
γーρ―アルクトゥルスと春の大曲線に沿ったうしかい座の星々です。
 アルクトゥルスとρーεの中間にある4等星の星12を同定できるかがカギになります。これが確認できれば3辺の頂点方法へギザギザに4-6等星を4つたどり斜め右に折れて半分ぐらい行ったところでぼやけた広がりのあるのが見つかったら、それがM3です。上の星野ではすぐ下と右に6等星があり3角形になっています。
アルクトゥルスとρーεの中間にある4等星の星12を同定できるかがカギになります。これが確認できれば3辺の頂点方法へギザギザに4-6等星を4つたどり斜め右に折れて半分ぐらい行ったところでぼやけた広がりのあるのが見つかったら、それがM3です。上の星野ではすぐ下と右に6等星があり3角形になっています。
「大きくて明るい」宣伝文句を頭に入れてると絶対に見つからないでしょう。暗くて小さいです。周りも暗い星ばかりです。
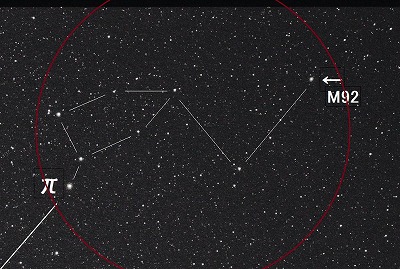
 画像は北斗七星の柄の部分です。
画像は北斗七星の柄の部分です。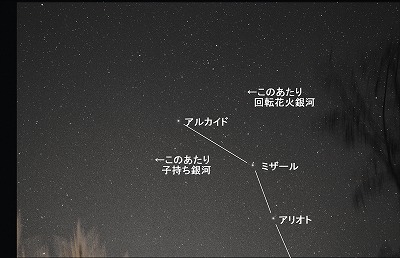
 ミザールを視界の端に置くと上に4-5等星が4つ左上に向かって視界に入ります。それをたどって4つ目で向きを右に向けるとより小さい6等星ぐらいのが横に4つほど並んで見えます。M101 は右から2番目の先にあります。
ミザールを視界の端に置くと上に4-5等星が4つ左上に向かって視界に入ります。それをたどって4つ目で向きを右に向けるとより小さい6等星ぐらいのが横に4つほど並んで見えます。M101 は右から2番目の先にあります。 こちらはアルカイドから直角に左に折れたところにあります。途中の4等星と同じ間隔で
こちらはアルカイドから直角に左に折れたところにあります。途中の4等星と同じ間隔で


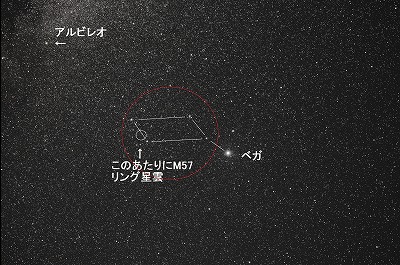 よく見ると左上の方に白鳥座のアルビレオが写っていました(^_^)
よく見ると左上の方に白鳥座のアルビレオが写っていました(^_^)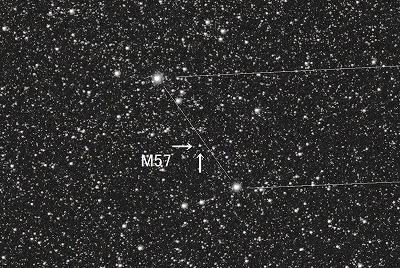 カメラ画像を拡大すると双眼鏡でも
カメラ画像を拡大すると双眼鏡でも

 これも条件が良ければ肉眼でも確認できました。
これも条件が良ければ肉眼でも確認できました。 2012年7月17日に撮りました。ISO6400 露出30秒の8枚をDeepSkyStackerで合成
2012年7月17日に撮りました。ISO6400 露出30秒の8枚をDeepSkyStackerで合成 2012年7月17日に撮りました。ISO6400 露出30秒の8枚をDeepSkyStackerで合成
2012年7月17日に撮りました。ISO6400 露出30秒の8枚をDeepSkyStackerで合成 ユリカモメ 飛んでるところピントがうまく合いません
ユリカモメ 飛んでるところピントがうまく合いません ムクドリ スズメの集団の近くでやはり集団で地表の虫を漁っていました
ムクドリ スズメの集団の近くでやはり集団で地表の虫を漁っていました アオサギ 羽がうっすらと青く薄汚れた感じ、頭のうしろに2本飾りがなびいてるのが良いですね
アオサギ 羽がうっすらと青く薄汚れた感じ、頭のうしろに2本飾りがなびいてるのが良いですね ツグミ 目の上の白の横一文字 茶色がかった羽 腹の斑点。地表の虫を探しているのでしょうか
ツグミ 目の上の白の横一文字 茶色がかった羽 腹の斑点。地表の虫を探しているのでしょうか ハクセキレイ 黒い帽子目の位置の黒の一文字、黒い長い尾、歩くとき尾を上下に振るのが目印です
ハクセキレイ 黒い帽子目の位置の黒の一文字、黒い長い尾、歩くとき尾を上下に振るのが目印です カルガモ 嘴の先が茶色 首から下が白地にこげ茶の斑点模様は行くほど大きく
カルガモ 嘴の先が茶色 首から下が白地にこげ茶の斑点模様は行くほど大きく
 ヒイラギナンテンの花でしょうか、一心についばんでいました。
ヒイラギナンテンの花でしょうか、一心についばんでいました。 キンクロハジロの家族です。白いのがオス
キンクロハジロの家族です。白いのがオス オオバンだと思います
オオバンだと思います イソシギです
イソシギです
 ハクセキレイ2題
ハクセキレイ2題 今回の逸品カワウ
今回の逸品カワウ 分かりません
分かりません

 このダイサギは初心者のためにあるような鳥です
このダイサギは初心者のためにあるような鳥です ここで一番人気のカワセミ 人を怖がらない遺伝子を持ってるとの都市伝説を語ってた人がいた
ここで一番人気のカワセミ 人を怖がらない遺伝子を持ってるとの都市伝説を語ってた人がいた ヒヨドリだと思います
ヒヨドリだと思います EOS M5 EF-M15-45 45mm f/6.3 1/250sec ISO100
EOS M5 EF-M15-45 45mm f/6.3 1/250sec ISO100 ちょうど池から獲物を捕って加えて食べているところです。腕が未熟なので被写体が浮き出ません。
ちょうど池から獲物を捕って加えて食べているところです。腕が未熟なので被写体が浮き出ません。