ラズパイの中身を理解し、「RaspberryPiで学ぶ電子工作」に従って電子工作プログラミング環境を整えるまでの備忘録を記録しています。 自分の備忘録なので情報は不正確なので参考にしませんように、悪しからず。
1.ラズパイにインストールしたOSとプログラミング環境
OSはDebian系のraspbianでubuntuと同じで素人のためにWEBの中に多くの先人の情報があるので安心です。
さらに jessie 系列のらしい。
システムのターミナルはLXTerminalを使う。
ラズベリーアイコン > アクセサリ > LXTerminal 又は上のタスクバーのアイコンから起動する。
プログラミング言語はpythonを、開発環境はIDLEというやつを使う。
何か知らんが、最新のものはv3らしいが、shellを起動するとPython2.7.13Shellと出るからv2も入っている。
起動は、ラズベリーアイコン > プログラミング > Python2(IDLE)
又はLXTerminalから $ sudo idle & でPython2.7.13が起動する。
Python3の機動は、ラズベリーアイコン > プログラミング > Python3(IDLE)
又はLXTerminalから $ sudo idle3 & でPython3.5.3が起動する。
先々まで使えるようにPython3を使うようにしよう。
データフォルダ:
ファイルマネージャはタスクバーのアイコン又はラズベリーアイコン > アクセサリ > ファイルマネージャ から開く。
/home/pi/の下にまとめてあって特出しになってるので分かりやすい。
テキストエディター:
defaultでLeappadを使うようになってる。ファイルマネーから開くドキュメントはこれで開いている。どういうわけか管理者権限になっているみたい。
ラズベリーアイコン > アクセサリ > Text Editor から開く。
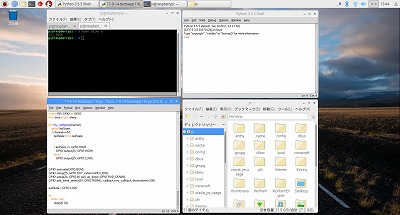 LXterminal、python3、idle、LeappPadを並べた
LXterminal、python3、idle、LeappPadを並べた
2.GPIO:種類と内容・機能など
合計PIN数:40PIN
5V電源:2端子 (USBで供給した外部電源の容量に依存する。 ラズパイが5W程度と言っているから、外部電源容量から1A差し引いた値と思うが、限度があるので控えめにしよう。
3.3V電源:2端子 (GPIOで使うのと合わせて合計で50mA以下か)
GND:8端子
GPIO:13端子 (3.3Vの電圧供給、1/0の出力1端子、あたり最大16mA、合計で50mA、入力電圧は3.3vまで、入力1/0の読み取り、プルアップ及びプルダウンの内部抵抗利用可(抵抗値は多分47kΩ))
3.3V電源に1.8kΩの抵抗が繋がったI2C通信用の専用端子:2端子
spi通信用の(専用?)端子:5端子、さらにもう1チャンネル分GPIO16、19、20、21がSPIに使えるらしい。計9端子と云うべきか?
PWM制御用の端子:4端子 (puls width modulation)
UART通信用の端子:2端子 (universal asynchronous receiver and tranmitter)
その他:2端子 ID_SD、ID_SC と書いてあるわけの分からない端子
GPIOのピン配置の指定:
Broadcomのプロセッサに合わせて指定するときは:GPIO.setmode(GPIO.BCM)
GPIOのコネクター番号に合わせて指定するときは:GPIO.setmode(GPIO.BOARD)
とする。
3.ディスプレイ無しで起動するか?
12017・9・28 追記
これは現場に設置したり遠隔で操作したりするときに必要で、以前linuxをいじくってた時に難儀したことなので確認した。
結論:
当然ディスプレイ部分はきちんと起動してないのは当然として、その他のところ:
無線LANは起動してない(外部からwifiでSSHできない)
有線LANは起動している
USBに繋げたワイアレスキーボードとマウスは使用可
ってことで、現場設置の時はこのままではディスプレイ持参する必要あり。
(工事中)
コメントする